Construction of Musculoskeletal Simulation for Shoulder Complex with Ligaments and Its Validation via Model Predictive Control
IROS2024
Yuta Sahara, Akihiro Miki, Yoshimoto Ribayashi, Shunnosuke Yoshimura, Kento Kawaharazuka, Kei Okada, and Masayuki Inaba
The complex ways in which humans utilize their bodies in sports and martial arts are remarkable, and human motion analysis is one of the most effective tools for robot body design and control. On the other hand, motion analysis is not easy, and it is difficult to measure complex body motions in detail due to the influence of numerous muscles and soft tissues, mainly ligaments. In response, various musculoskeletal simulators have been developed and applied to motion analysis and robotics. However, none of them reproduce the ligaments but only the muscles, nor do they focus on the shoulder complex, including the clavicle and scapula, which is one of the most complex parts of the body. Therefore, in this study, a detailed simulation model of the shoulder complex including ligaments is constructed. The model will mimic not only the skeletal structure and muscle arrangement but also the ligament arrangement and maximum muscle strength. Through model predictive control based on the constructed simulation, we confirmed that the ligaments contribute to joint stabilization in the first movement and that the proper distribution of maximum muscle force contributes to the equalization of the load on each muscle, demonstrating the effectiveness of this simulation.
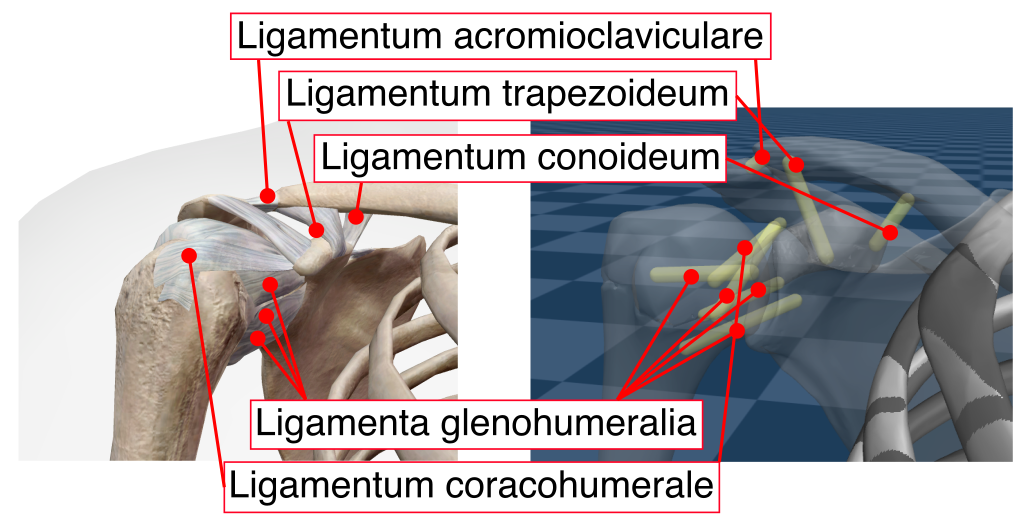
Ligaments
The yellow wire on right figure is the ligament.
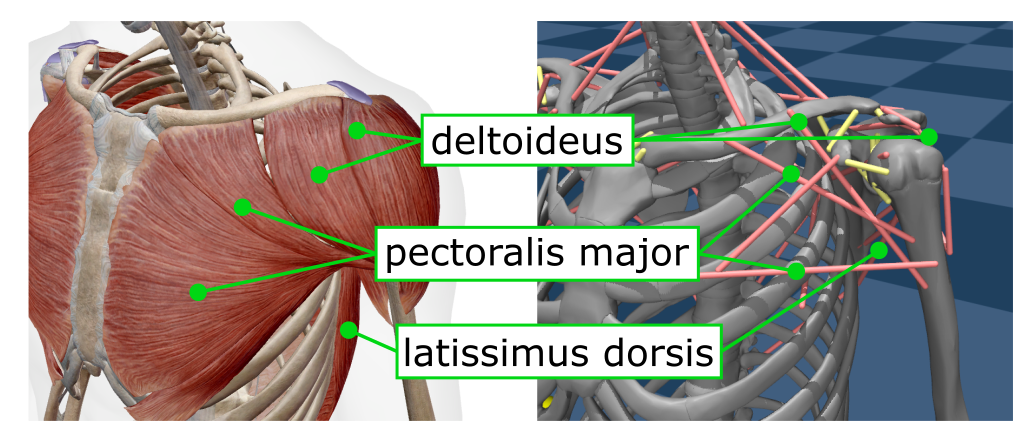
Muscles
The red wire on right figure is the muscle. This model has 20 muscles on each shoulder, for a total of 40 muscles.
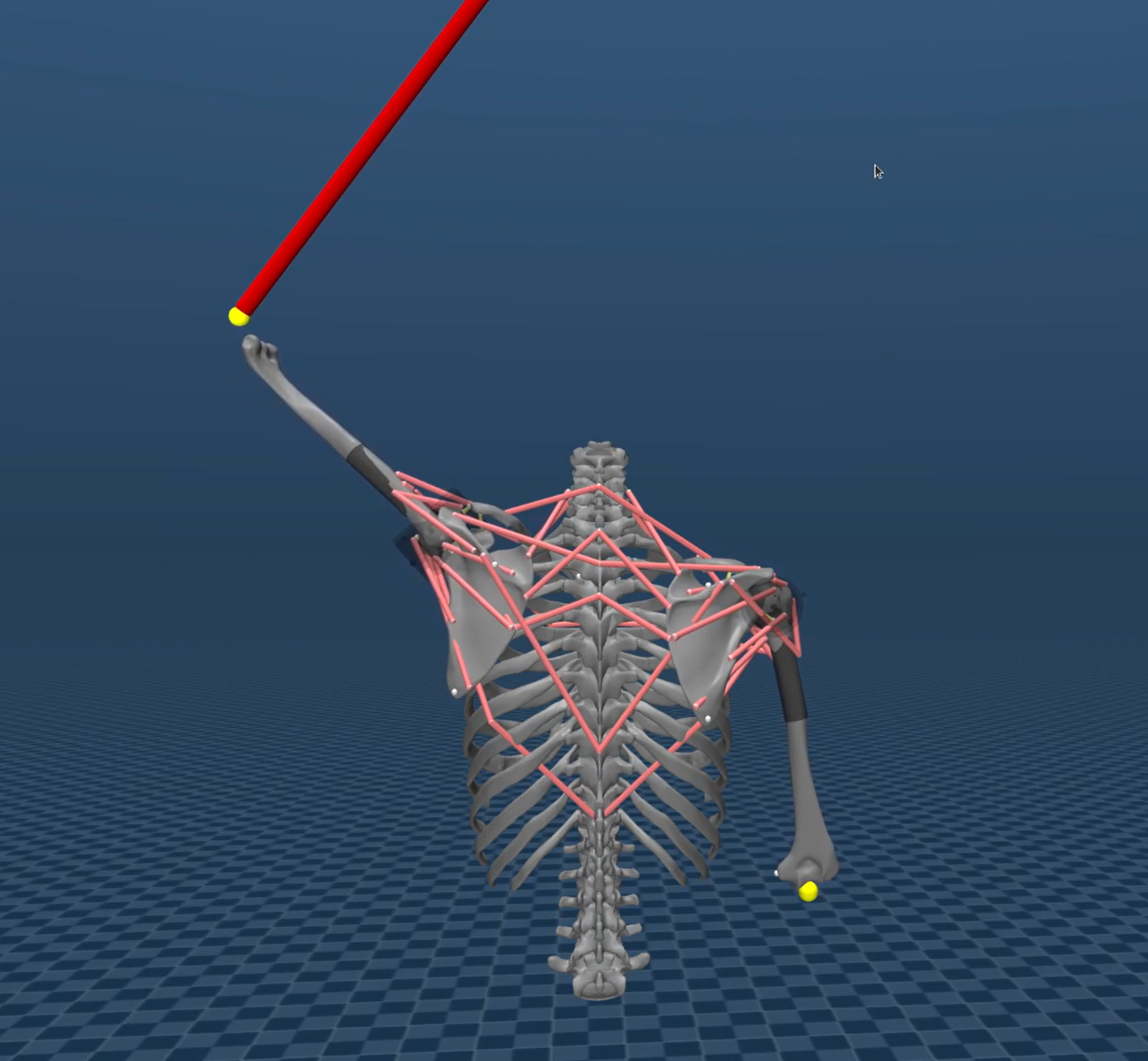
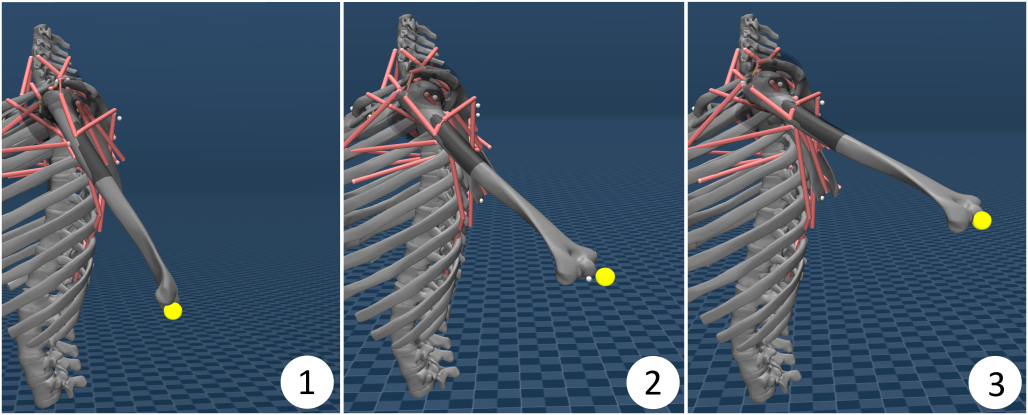
Position control of the proposed musculoskeletal model with MPC
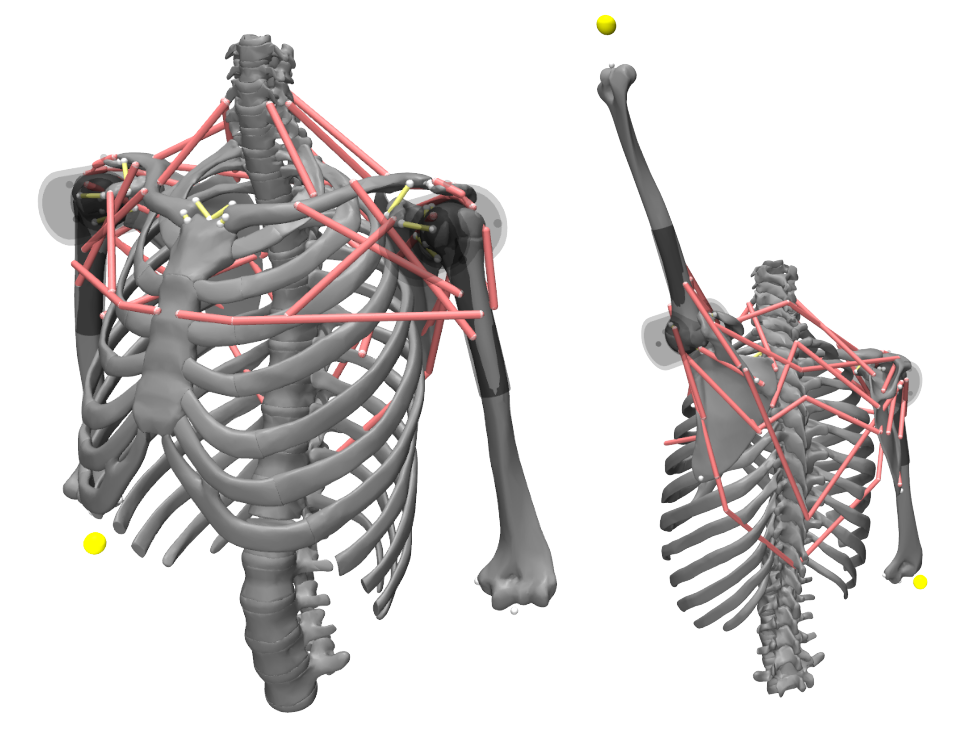
The two yellow balls are the target positions. The muscles are controlled to bring the tip of the humerus closer to the target position.
Achieved motions with MPC
As in humans, approximately 180 degrees of abduction, 180 degrees of anterior flexion, and 50 degrees of posterior flexion can be observed. In addition, the shoulder can shrug shoulders.
Abdaction
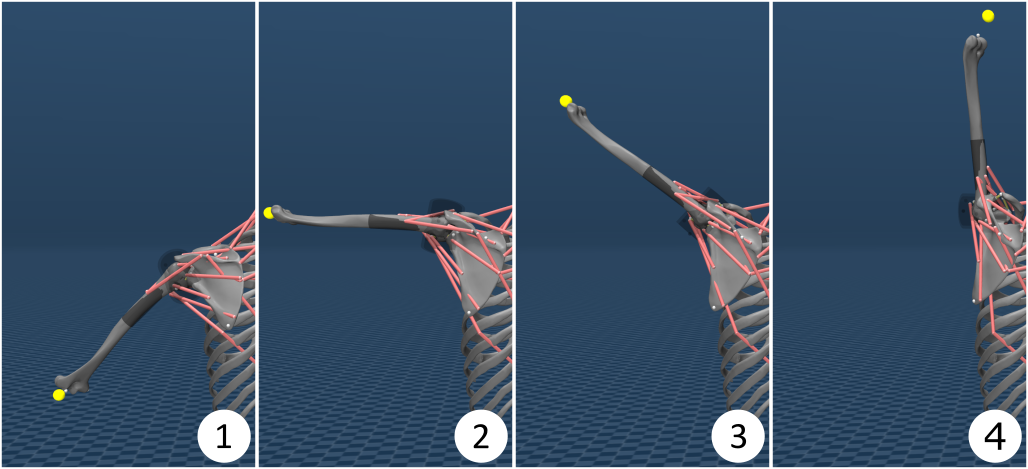
Flextion
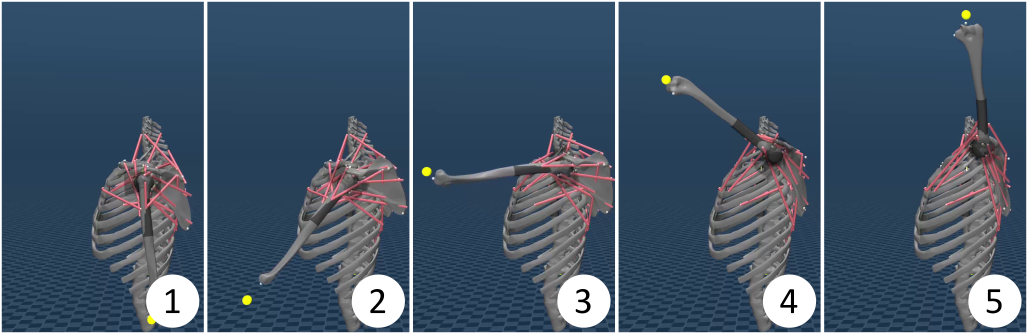
Extension
Shrug
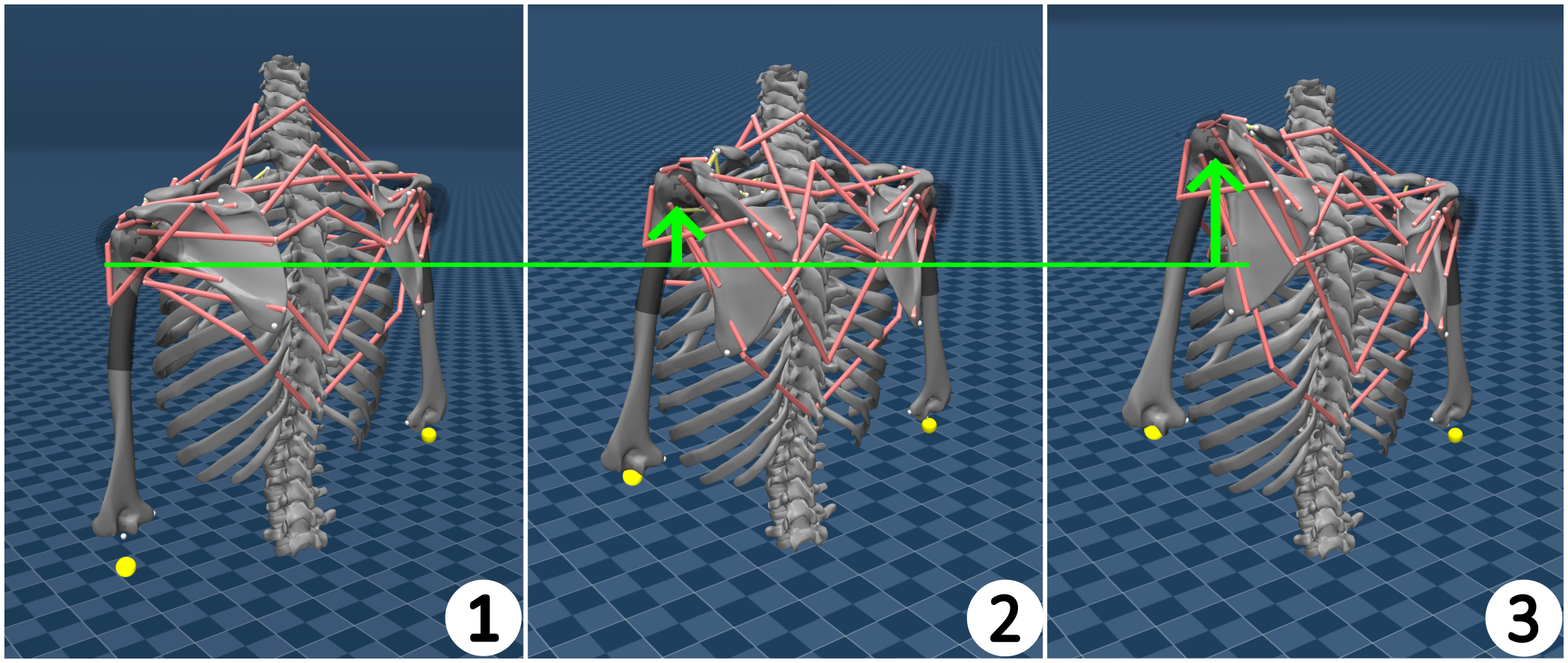
Motions
Bibtex
@inproceedings{sahara2024shouldercomplexsimulation,
title={{Construction of Musculoskeletal Simulation for Shoulder Complex with Ligaments and Its Validation via Model Predictive Control}},
author={Yuta Sahara, Akihiro Miki, Yoshimoto Ribayashi, Shunnosuke Yoshimura, Kento Kawaharazuka, Kei Okada, and Masayuki Inaba},
booktitle={Proceedings of the 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems},
year={2024},
}Contact
If you have any questions, please feel free to contact Yuta Sahara (sahara[at]jsk.imi.i.u-tokyo.ac.jp).